
ID : 4777
非常停止時、モータOFFで各軸を動かすには
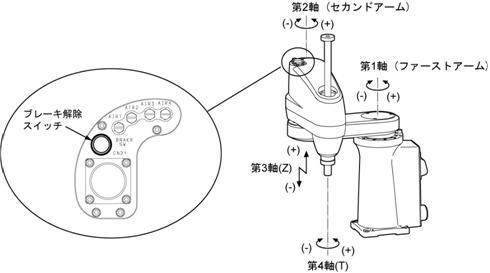
非常停止時、モータOFFのまま各軸を動かす方法を下表に示します。 なお、第3軸(Z)・第4軸(T)は、ブレーキ付ですのでブレーキ解除の操作が必要です。
ブレーキ解除操作を行うと、Z軸が落下します。けがおよび設備損傷の恐れがないことを確認の上、作業を行ってください。
非常停止時の各軸の動かし方
| 軸 | 各軸の動かし方 | (注)TP:ティーチングペンダント MP:ミニペンダント |
|---|---|---|
| 第1軸 |
手でアームを押して動かす。 |
|
| 第2軸 | ||
| 第3軸(Z軸) |
<UL仕様以外のロボット>
<UL仕様のロボット>
|
|
| 第4軸(T軸) | ||
|
|
||
手でロボットを動かす際は、プラスチックカバー以外の部分を持って行ってください。
ID : 4777