
ID : 4458
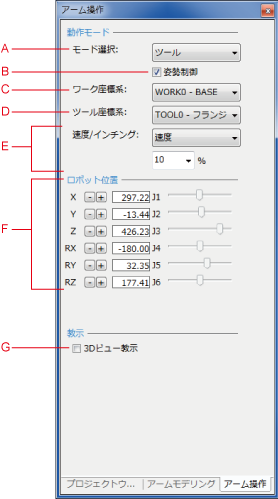
アーム操作
「アーム3Dビュー」に表示されたロボットのアームを各軸ごとに操作します。
項目の説明
A:モード選択
動作モードを選択します。
- 各軸:各軸を操作します。
- XY-直交:選択したワーク座標にしたがって移動します。RX,RY,RZはツール原点を中心のワーク座標軸周りに回転します。
- ツール:選択したツール座標にしたがって移動します。RX,RY,RZはツール原点中心にツール座標軸周りに回転します。
B:姿勢制御
X-Y、TOOLモード動作時の姿勢制御機能をON、OFFします。
C:ワーク座標系
ワーク座標を選択します。
D:ツール座標系
ツール座標を選択します。
E:速度/インチング
ロボットの動かし方を選択します。
- 速度 :-/+ ボタンを押している間、指定した速度に従って連続移動します
- インチング : -/+ ボタンを押すごとに指定した移動量の単位で移動します。
F:「位置移動」ボタン
「アーム3Dビュー」に表示されたロボットを選択した動作モードにあわせて移動します。
G:「3Dビュー教示」
アーム3Dビューウィンドウ内のオブジェクトをクリックするとその面に正対する姿勢を教示できます。
ID : 4458