
ID : 3458
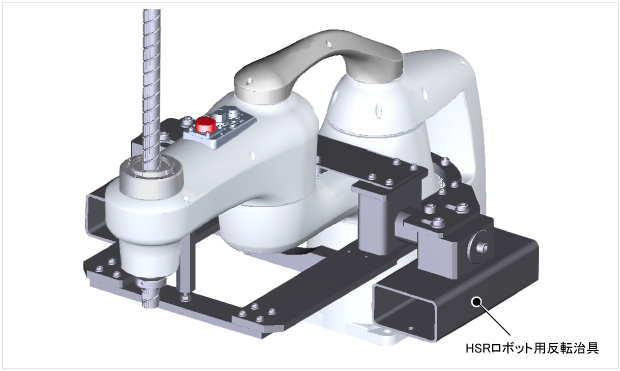
反転治具の作成例
ここでは、天吊りロボットの設置を行うために必要な反転治具の一例を説明します。
天吊り用HSRロボットを反転させるために、下図のような反転治具を作成します。
1
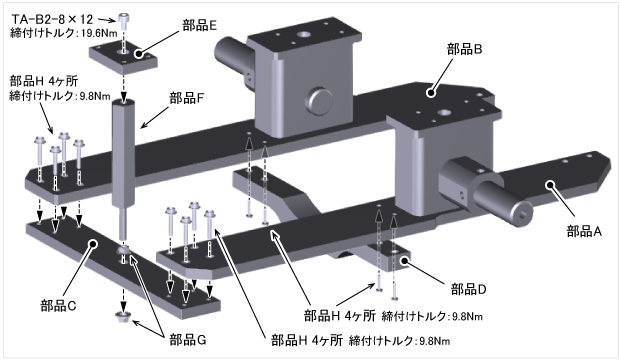
部品A~部品Hを下図のように組み立てます。各部品は、下表の参考図を参照して作成してください。
| 番号 | 参考図 |
|---|---|
| 部品A |
PLATE(図面(PDF:646KB)) |
| 部品B |
PLATE(図面(PDF:654KB)) |
| 部品C | PLATE(図面(PDF:132KB)) |
| 部品D | PLATE(図面(PDF:136KB)) |
| 部品E | BRACKET(図面(PDF:113KB)) |
| 部品F | HEXAGON SUPPORT (株)ミスミ社製 PLSBH24-115-F40-M8-N8(図面(PDF:88KB)) |
| 部品G | NUT (株)ミスミ社製 FRNUT8((PDF:246KB)) |
| 部品H | フランジソケット M6×25 (株)ミスミ社製 070006025((PDF:205KB)) |
2
STEP1で組み立てた治具をロボットのT軸にぶつからないように注意しながら、ロボットに組み込みます。

3
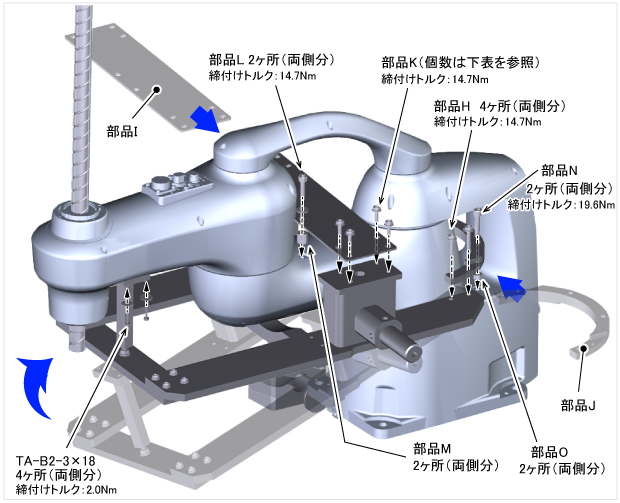
STEP1で組み立てた治具とロボットを部品I~部品Oおよび、ボルトで固定します。
| 番号 | 参考図 |
|---|---|
| 部品I |
|
| 部品J | BRACKET(図面(PDF:121KB)) |
| 部品k |
|
| 部品L |
|
| 部品M | COLLAR : 内径6.5L13.5 : 2ヶ所 (株)ミスミ社製 DWSSM-D14.5-V6.5-L13.5((PDF:419KB)) |
| 部品N | ボルト (株)ミスミ社製 CB8-35((PDF:86KB)) |
| 部品O |
COLLAR : 内径8.5L8 : 2ヶ所 (株)ミスミ社製 DWSSM-D15-V8.5-L8((PDF:236KB)) |
4
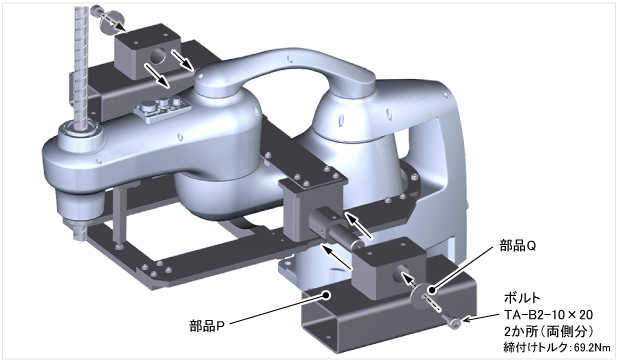
部品Pと部品Qを、STEP3で組み合わせた治具に組み付けます。各部品は、下表の参考図を参照して作成してください。
| 番号 | 参考図 |
|---|---|
| 部品P | PLATE(図面(PDF:100KB)) |
部品Q |
COVER(図面(PDF:102KB)) |
5
STEP4で組み付けた部品Qを部品Rとボルトで固定します。各部品は、下表の参考図を参照して作成してください。
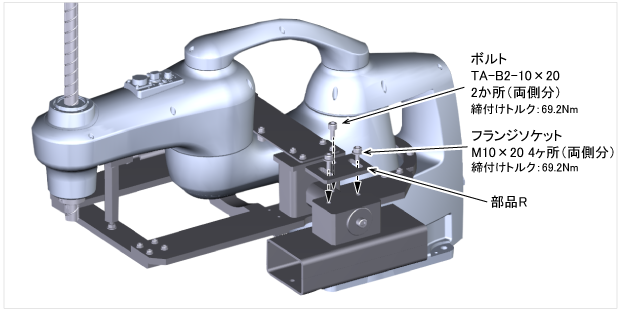
| 番号 | 参考図 |
|---|---|
| 部品R | PLATE(図面(PDF:109KB)) |
ID : 3458