
ID : 3420
使用上の注意
ここでは、下記のような分類に分けて、使用上の注意を記載しています。
食品用ロボットジャケットセットを取り扱う際には以下の点に注意してご使用ください。
ロボットジャケットの使用上の注意
| 注意内容 | 詳細 | |||
|---|---|---|---|---|
|
交換の目安 |
ロボットジャケットは消耗品となります。1年を使用目安に交換を推奨いたします。また、定期的にロボットジャケットをチェックいただき、傷、破れ、ほつれなどが見つかりました場合でも交換を推奨いたします。 ※本ジャケットの保証は梱包から取り出し、ロボットに着用させるまでとなります。 |
|||
取付、取り外し時の注意 |
|
|||
| 使用中の注意 |
|
|||
| 保管について |
|
|||
| その他 |
|
ロボットハンド設計上の条件
ロボットのハンドを設計する際には、以下の内容に注意して設計してください。
-
最大可搬質量、最大許容慣性イナーシャ (慣性モーメント)
ロボットジャケット装着後のロボットの仕様を下記に示します。
項目 VS-068 VS-087 最大可搬質量 6kg 最大許容慣性イナーシャ (慣性モーメント) J4、J5まわり : 0.440kgm2
J6まわり : 0.100kgm2
上記仕様を超えないようにしてください。
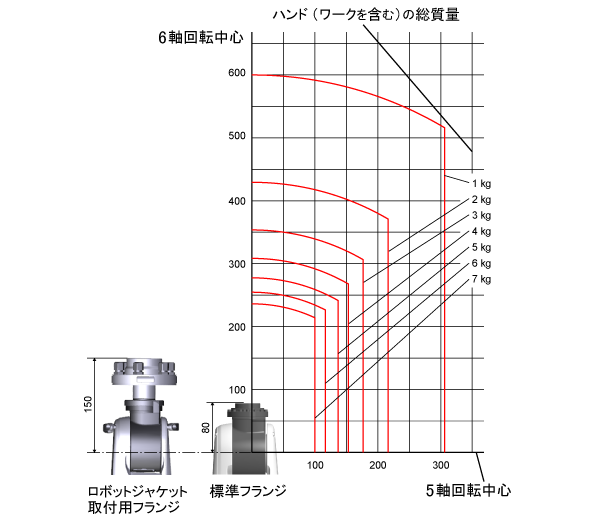
ハンド設計の計算にはハンドだけでなくワークや配線、配管などフランジに負荷のかかるものすべてを考慮に入れてください。ハンド(ワークを含む)は振動しないように設計してください。
また、ハンドおよびワークなどのフランジにかかる負荷の質量を計算する際は、ロボット取付用フランジの質量 (0.7kg) も足してください。
例えば、ロボットハンドの質量 = 3.0kg、ワークなどのハンド以外の負荷 = 0.2kgの場合、フランジにかかる負荷の総質量は以下のようになります。
3.0kg + 0.2kg + 0.7kg = 3.9kg ロボットハンド設計上の注意点を守らない場合、ロボット本体の各締結部にゆるみ、ガタつきが発生し、位置ズレを起こす可能性があり、ロボットおよびロボットコントローラの破損につながります。
下図はハンド (ワークを含む) の体積が比較的小さい場合の重心位置の分布を示しています。
ハンドの設計を行う際には下図を参考にハンドの設計をしてください。
-
ツールの位置
ロボットジャケット取付用フランジを取付けることによって、ロボットハンド取付面が、アプローチベクトル方向に70㎜ 移動した位置になります。
ツール設定をする際は、アプローチベクトル方向に70mmを足して設定してください。
-
ロボットハンド取付面の条件(ロボットハンド周辺に水滴がかかる可能性がある環境の場合)
ロボットジャケット取付用フランジAのOリングの全周を押し潰せるように、ハンド側の取付け面の外形は、直径59mm以上の大きさにしてください。
また、ハンド側のOリング接触面の面粗度はRz6.3(Ra1.6)で設計してください。また、接触仕上げは、送りを入れないようにしてください。条件を満たさない場合、水滴がロボットジャケット内部に侵入し、ロボット本体の故障につながるおそれがあります。
-
ロボットハンドの幅が70㎜を超えるものでは、ユーザ配線や配管をケーブルグランドから外部に出す際には注意が必要です。その場合、ユーザ配線や配管を まっすぐにのばした状態で外部に出そうとすると、ロボットハンドにぶつかり、屈折させなければなりません。
急激に曲がった状態で屈折させると、損傷や性能の劣化につながる恐れがあります。 ユーザ配線や配管とロボットハンドとの間にはスペースを持たせ、ゆるやかに曲がるように設定してください。
詳細は、ハンド寸法の注意点(PDF:729KB)を参照してください。
ロボットハンドを取り外した状態でのロボットジャケットの洗浄·消毒
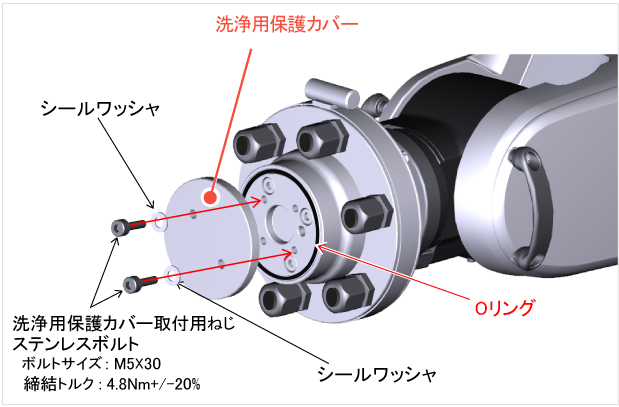
ロボットハンドを取り外して洗浄·消毒する場合、そのままだと内部に液体が浸水する可能性があるため、必ず下図のように洗浄用保護カバーを取り付けてから洗浄·消毒してください。
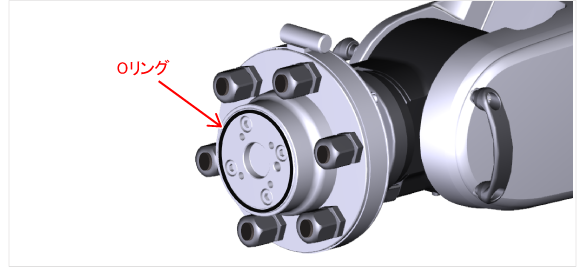
また、洗浄用保護カバーを取り付ける際には、ロボットジャケット取付用フランジAに必ずOリングが取り付いていることをご確認ください。
洗浄用保護カバーはオプションとして販売しております (品番 : 410389-317*)。
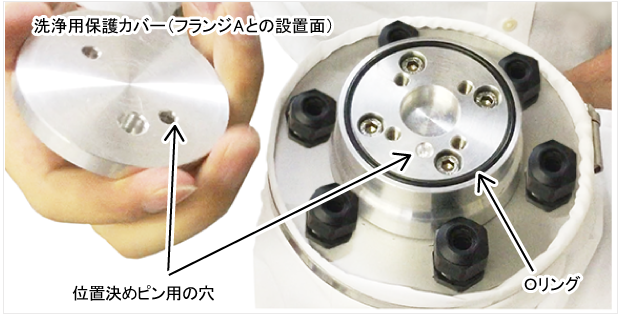
洗浄用保護カバーは、ロボットジャケット取付用フランジAとの接触面に、位置決め用の穴が開いています。洗浄用保護カバーを取り付ける際には、ロボットジャケット取付用フランジAの位置決め用の穴の位置とあうように取付けます。
- ロボットにロボットジャケットを着用したまま洗浄する場合には、必ず拭き取り洗浄をしてください。
- 洗浄用保護カバーを洗浄以外の目的で使用しないでください。
ID : 3420