
ID : 1956
形態の境界
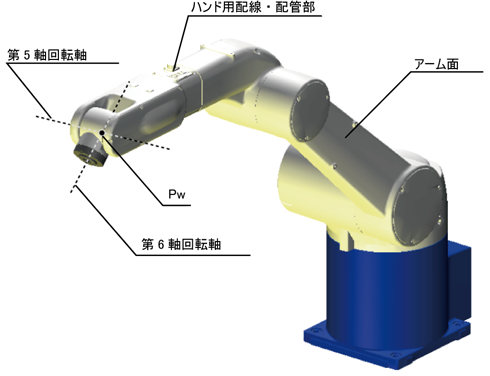
腕・ひじ・手首・第6軸の各種の形態に対する境界条件について説明します。
腕・ひじ・手首の境界の判定は、第5軸の回転軸と第6軸の回転軸が交わる点「Pw」の位置を使って行います。
|
各種形態の境界位置を特異点と呼びます。
MOVE、APPROACH、DEPARTなどの、CP動作をするコマンドは、特異点の近傍を通ることはできません。
軌道上に特異点近傍がある場合には、84204060番台(指令速度過大です)または、83204070番台(ソフトウェアリミットオーバーです)を発生し、ロボットが停止することがあります。
ID : 1956