
ID : 1704
ティーチング
ここでは、ロボットを手動モードで位置変数P1 とP2 の値をティーチングする方法について説明します。
ロボットの位置(P1)のティーチング
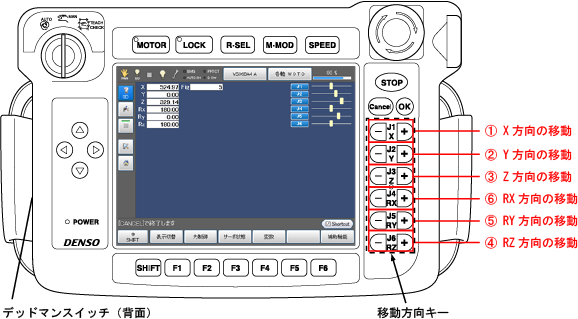
ティーチングペンダントの初期画面から[F2 アーム]を押すとアームの各軸の情報が表示されます。
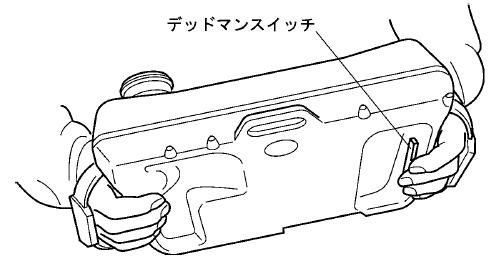
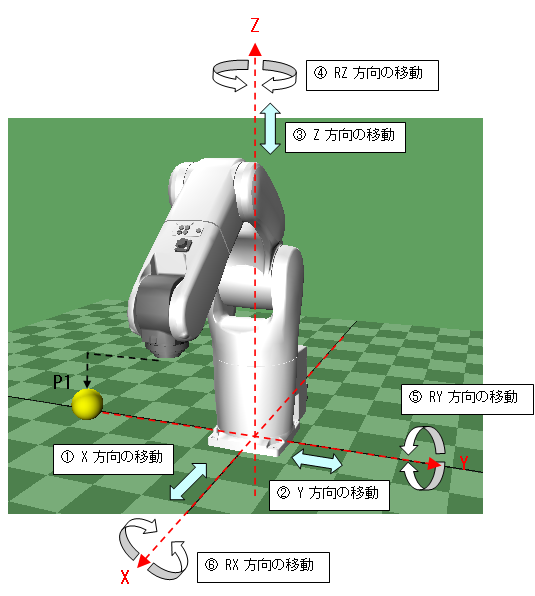
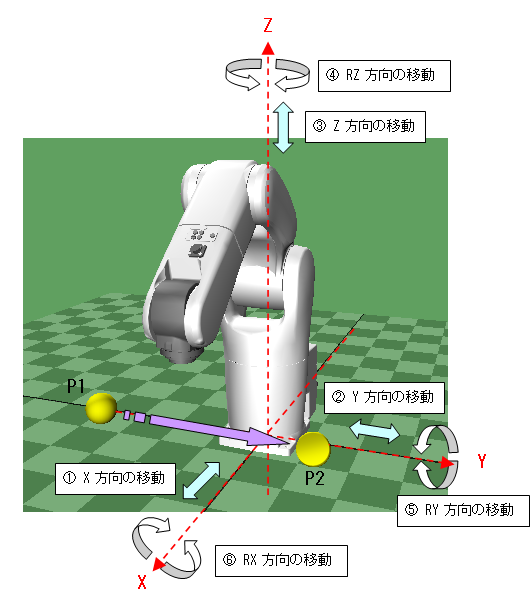
デッドマンスイッチを押しながら、移動方向キーを適宜押して、P1に設定したい位置までロボットを動かします。
ティーチングした値を変数名P1へ保存
次の手順にて、ティーチングした値を[変数名P1]に保存します。
1
[F4 変数]を押します。

次の手順に示す画面が表示されます。
2
変数ウィンドウで変数タイプを選択します。
ここでは、P変数に位置を保存するので、画面内の[P変数タブ]を押します。

3
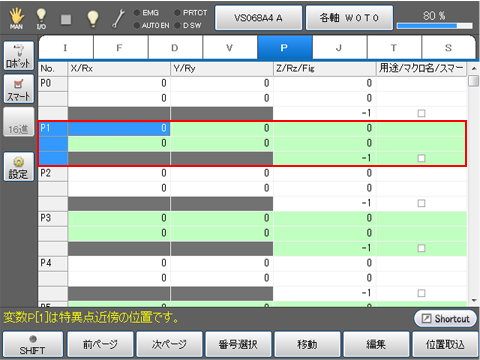
カーソルキーやジョグダイヤルを使って[変数名P1]の欄を選択します。
画面内の変数名P1のいずれかのデータ欄を直接押しても選択できます。
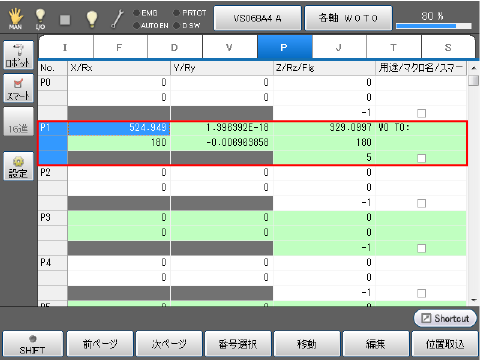
P変数ウィンドウには、図のように一つの変数において12種類のデータが表示されています。
[変数名 P1]を選択する際、12種類のデータのうちいずれか一つを反転させれば、[変数名 P1]を選択したことになります。
4
[変数名 P1]が選択されていることを確認します。
5
[F6 位置取込]を押します。

6
システムメッセージを確認し、良ければ「座標系情報を用途に書き込みます。」にチェックを入れ[OK]を押します。 (この機能はVer.1.8.*から使用可能です。)
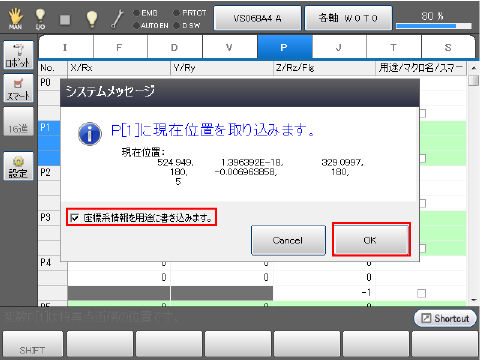
現在位置が変数P1の値として取り込まれます。用途欄には座標系情報(ワーク番号、ツール番号)が書き込まれています。
- 既に用途欄に書き込みしてある場合は、座標系情報を上書きします。
- コントローラ再起動時、「座標系情報を用途に書き込みます。」のチェックは保持されます。(Ver.1.13.*以降)
- 座標系情報が書き込みしてある用途欄を選択し、[F5 編集]を押すと用途欄の内容をクリアします。
ロボットの位置(P2)のティーチングおよび[変数名 P2]への保存
1
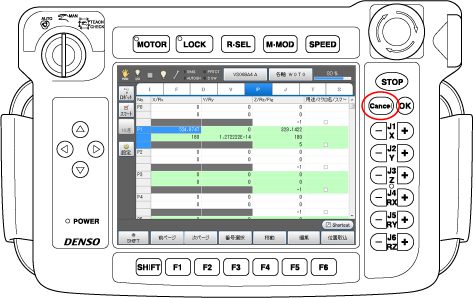
[Cancel]ボタンを1回押して、[ロボット現在位置]ウィンドウに戻します。

2
デッドマンスイッチを押しながら、移動方向キーを適宜押して、P2に設定したい位置までロボットを動かします。
3
ステップ2「ティーチングした値を[変数名 P1]に保存する」の手順に従って、P2の値を[変数名 P2]に保存します。
これで、P1とP2のティーチングが完了しました。
ティーチングした位置への移動方法については、「変数指定移動の操作」を参照ください。
ID : 1704