
ID : 1424
専用入出力信号の使用例
専用入出力信号を使って起動、停止を行なう例を以下に説明します。
設備例
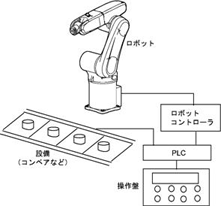
ここでは、下図に示すようにPLCを介してロボットコントローラと接続された外部の設備操作盤を操作することにより、ロボットに作業を行なわせる設備を想定します。設備操作盤には、下表に示すような表示器・ランプ・スイッチがあるものと想定します。
ロボットを使った設備例
設備操作盤の機能例
| 分 類 | 部 品 | 用 途 |
|---|---|---|
| 表示部 | 表示部 | 「ロボット準備OK」等のメッセージを表示 |
| ランプ | ①自動運転ランプ |
|
| ②ロボット外部起動可能ランプ |
|
|
| ③運転可ランプ |
|
|
| ④ロボット作業原点ランプ |
|
|
|
スイッチ |
①ロボット準備ボタン | ロボットの立ち上げを開始させる |
| ②自動スタートボタン | 設備の運転を開始させる | |
| ③サイクル停止ボタン | 設備を1サイクル作業終了後停止させる | |
| ④運転/調整切替スイッチ |
|
実際の設備においては、非常停止・インタロックなどのための機能が必要となりますが、ここでは説明に必要なもののみ記述して、他は省略します。
ID : 1424
- このページに関連する情報
- 概略手順
- 起動・停止の手順と専用入出力信号