
ID : 1006
処理方法概要
I/Oコマンドを実行するには、下図に示すような処理を行ないます。
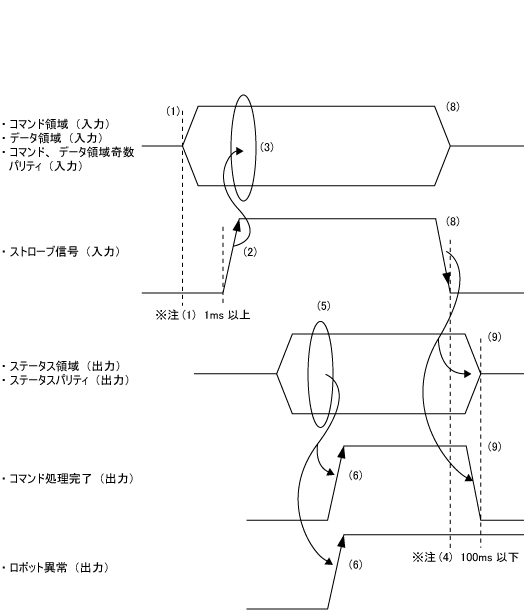 |
I/Oコマンド処理方法概要(標準モード)
- 外部からロボットコントローラのコマンド実行入出力信号に対して、コマンド領域、データ領域(必要な場合のみ)、コマンド・データ領域奇数パリティをセットします。
セットするデータは、ストローブ信号を立ち上げる1ms以上前に確定しておく必要があります。 - セット完了後、ストローブ信号をOFF→ONに立ち上げます。
ストローブ信号によるコマンド入力は専用出力「ロボット初期化完了」が出力されるのを待ってから行なってください。ただし、エラー発生時にロボット異常クリアを実行する場合は、ロボット初期化完了は出力されないので、そのまま実行してください。
- コントローラは、ストローブ信号入力でコマンド領域、データ領域、コマンド・データ領域奇数パリティを読み込みます。
- コントローラは、読み込んだコマンドに基づき、処理を行ないます。
- コマンドがステータス出力するものであった場合には、コントローラはステータス領域、ステータスパリティをセットします。
- コマンド処理が完了し、ステータス領域を設定した後、コントローラはコマンド処理完了信号をOFF→ONに立ち上げます。 処理中にエラーが発生した場合には、コマンド処理完了信号と同時にロボット異常も出力されます。
- PLCは、コマンド処理完了信号が入力するのを待って、必要ならばステータス領域の状態を取得します。この際、ロボット異常が発生していないかの確認も行なってください。
- PLCはステータス読込み完了後、コマンド・データ領域およびストローブ信号をOFF状態にします。
ストローブ信号をON→OFFに立ち下げた後、ステータス領域とコマンド処理完了信号が、OFFになるまでの最長時間は100msです。 - コントローラは、ストローブ信号のON→OFFの立ち下がりで、ステータス領域とコマンド処理完了出力を、OFF状態にします。
コマンド処理エラーに伴い出力されるロボット異常は、ロボット異常クリアコマンドが実行されるまでON状態を保持します。
コマンド処理完了信号がOFF→ONに立ち上る前にストローブ信号がOFFになっていた場合、コマンド処理完了信号とステータス領域はいったん出力された後、100ms以内にOFF状態になります。
ID : 1006