
ID : 856
ロボットの運搬方法
1
ロボットを、下図に示す運搬姿勢にします。第2軸、第3軸、第4軸を手動動作で移動することにより、運搬姿勢にします。
納入時の梱包状態は運搬姿勢になっていますので、最初はこの作業は不要です。
- VM-6083、VM-60B1の場合
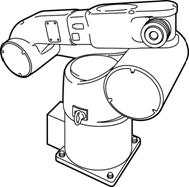
- 運搬姿勢
| 軸 | 角度 |
|---|---|
| 第1軸(J1) | 0° |
| 第2軸(J2) | -90° |
| 第3軸(J3) | +165° |
| 第4軸(J4) | +90°または-90° |
| 第5軸(J5) | +90°または-90° |
2
本体間ケーブル、エア配管、ユーザ用信号ケーブルはロボット本体からはずしてください。
納入時の梱包状態では、この作業は不要です。
3
右図に示すように、アイボルトを取付けます。
納入時の梱包状態では、アイボルトは付いていますので、この作業は不要です。
- VM-6083、VM-60B1の場合
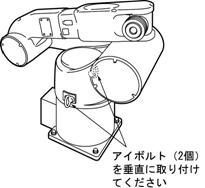
アイボルトの取り付け
4
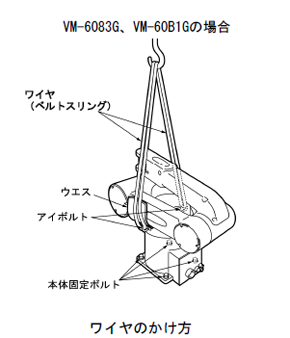
右図に示すように、第2アームにウエスをはさみ、アイボルト2ヵ所にワイヤを固定してください。
5
作業者Aは、ロボットが転倒しないようにロボットを支えながら、本体固定ボルトをはずします。
6
作業者Bは、クレーンを操作し、目的の場所までロボット本体を移動します。
7
ロボットの設置場所におろし、作業者Aは本体固定ボルト4本を使って、ロボットを仮止めします。
8
ロボットを、次ページの 「ロボットの設置方法 」の説明に基づいて、固定します。
9
アイボルトを本体からはずします。
- ロボットの運搬方向に障害物がないことを確認してください。
- アイボルトをはずしてからロボットを動作させてください。アイボルトを付けたままロボットを動作させると、ロボットアームとアイボルトが衝突する危険があります。
ID : 856