
ID : 845
ロボットハンド設計上の注意点
ロボットのハンドを設計するときは、以下の項目を満足するように設計します。
ロボットハンド設計上の注意点を守らない場合、ロボット本体の各締結部にゆるみ、ガタが発生し、位置ズレを起こしたり、最悪の場合には、ロボットのメカ部品およびロボットコントローラが破損する危険があります。
ハンド質量
ハンド・ツール(ワークも含む)の総質量の最大値が、ロボットの最大可搬質量以下になるように設計してください。ハンド・ツールに使う配線、配管材等も総質量に含まれます。
ハンド・ツール総質量最大値(ワーク質量を含む)≦最大可搬質量(10kg)
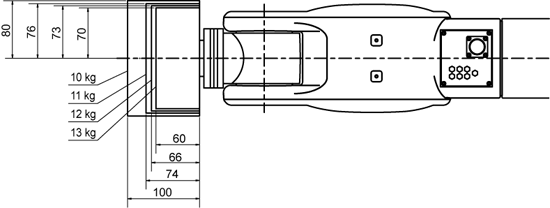
ハンド重心位置
ハンド・ツール(ワークも含む)の重心位置が、下図の範囲におさまるように設計してください。
 |
J4、J5、J6回り慣性モーメント
ハンド・ツール(ワークも含む)のJ4、J5、J6回り慣性モーメントが、ロボットの最大許容慣性モーメント以下になるように設計してください。
ハンド・ツールのJ4、J5、J6回り慣性モーメント(ワーク質量を含む)≦最大許容慣性モーメント
| 可搬設定 |
最大許容慣性モーメント [kg・㎡] |
|
|---|---|---|
| [kg] | J4、J5まわり | J6まわり |
| ~1 | 0.04 | 0.006 |
| ~2 | 0.07 | 0.013 |
| ~3 | 0.11 | 0.019 |
| ~4 | 0.14 | 0.026 |
| ~5 | 0.18 | 0.032 |
| ~6 | 0.22 | 0.038 |
| ~7 | 0.25 | 0.045 |
| ~8 | 0.29 | 0.051 |
| ~9 | 0.32 | 0.058 |
| ~10 | 0.36 | 0.064 |
ロボットハンド取り付け時の注意
基準穴φ6H7には、ピンで叩き込むような外力を加えないでください。故障の原因となります。
基準穴については、「第6軸へのCALSET治具の取り付け手順
」を参照してください。
ID : 845
- このページに関連する情報
- 慣性モーメント計算式