SHDEFMODEL
(ステートメント)

サーチモデルの登録をします。

SHDEFMODEL <モデル番号>,<X座標>,<Y座標>,<幅>,<高さ>,<オフセットX>,
<オフセットY>[,<オフセット角度>]

<モデル番号>
登録するモデルの番号を指定します。(0~99)
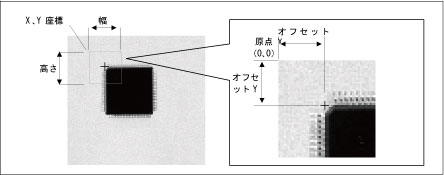
<X座標>
登録モデルの原点X座標を指定します。(16~485)
<Y座標>
登録モデルの原点Y座標を指定します。(16~463)
<幅>
登録モデルの幅を指定します。(10~256)
<高さ>
登録モデルの高さを指定します。(10~255)
<オフセットX>
原点からのオフセットXを指定します。(-511~+511)
<オフセットY>
原点からのオフセットYを指定します。(-511~+511)
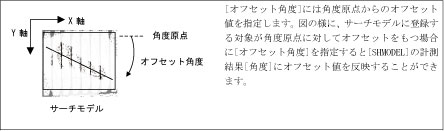
<オフセット角度>
角度原点からのオフセット角度を指定します。(-360~360)[V1.4以降]

-
登録モデルは画面端から内側16画素以上離れていなければ登録できません。
-
基準座標はモデルサーチ時に検出する点をどこにするかを指定するものです。
-
登録モデルはある程度の輝度分布と特徴が必要です。あまり輝度分布が平坦すぎるもの、逆に細かい変化が多すぎる場合登録できません。
-
すでに登録されている番号を指定した場合上書きします。
-
登録の可否は命令実行後、VISSTATUSにより知ることができます。
-
本命令を実行時に処理画面3番をワークエリアとして使用するため処理画面3番のデータは保証されません。また、処理画面3番(VISWORKPLN 3)は処理できません。VISSTATUS (n)n項目0実行結果0 = 正常-1 = 指定範囲エラー-2 = スペースフル-3 = 均一モデル-4 = 複雑1,2 = サーチ時間大3,4 = 角度特定不可[V1.4以降]1未使用 02実行時間
-
本命令はロボットコントローラではμVisionボード(オプション)が必要です。
-
本命令実行時に電源をOFFしないでください。次の電源ON時に正常に終了しなかったと判断し、視覚に関する情報を初期化します。


|
VISSCREEN 1,0,1
|
'描画画面0番に即時描画します。
|
|
VISCLS 0
|
'
|
|
VISRECT 100,100,100,100
|
'
|
|
CAMIN 1
|
'カメラ映像を格納メモリに取得します。
|
|
SHDEFMODEL 1,100,100,100,100,50,50
|
'モデルを登録します。
|
|
I1 = VISSTATUS(0)
|
'
|
|
VISLOC 10,10
|
'
|
|
IF I1 = 0 THEN VISPRINT "登録完了" ELSE VISPRINT "登録できません。"
|
|
|
VISCAMOUT 1
|
'
|