
ID : 6420
ロボットの位置決め時間
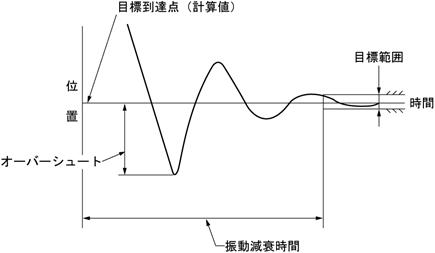
- サイクルタイムの算出に使う位置決め時間のグラフを、図に示します。
- 位置決め時間は、ロボットの動作開始から目標点に達するまでに要する時間を示します。
- ロボットを位置決め目標点に向かって動作させると目標到達点を越えたあと、下図のように振動が減衰し目標点に位置決めされます。この振動減衰時間はグラフに考慮されていません。
- 振動減衰時間は、ハンド等の重量に依存します。オーバーシュートや振動減衰時間が特に問題となるようなロボットの使い方をする場合は、事前に十分テストを行ない確認をしてください。
- ロボットの残留振動がおさまる前に加速を開始した場合、過電流エラーが表示されることがあります。この場合には次のいずれかの処置を行なってください。
· 直前の動作の減速度をDECELコマンドで落とし、残留振動を小さくする。
· 残留振動がおさまるまでDELAYコマンドで待つ。
· ACCELコマンドで加速度を落とす。 - 負荷設定値はハンド質量・ワーク質量を十分確認のうえ最適な設定値で運転してください。設定値が不適切ですと、ロボットの故障原因となる場合があります。
|
ID : 6420
- このページに関連する情報
- HSR048A1*の位置決め時間
- HSR055A1*の位置決め時間
- HSR065A1*の位置決め時間