
ID : 5638
付録
工程間搬送ロボットに関するその他の留意事項について説明します。
CP動作について
工程間搬送ロボットは、CP動作に対応していません。
詳細は以下のとおりです。
- ティーチングペンダントでの動作モードで、XY・ツール動作が選択不可(各軸動作のみ選択可)
- ティーチングペンダントの変数移動にて、P型、T型変数が選択不可(J型変数移動はPTP動作のみ選択可)
- TOOL等のツール、ワーク、エリア機能関連の宣言文は未対応
- MOVE等のロボット制御文を指定する際、補間方法にてCP動作(L、C、S)、指定座標にてP型、T型変数は未対応
アーム3Dビューについて
工程間搬送ロボットは、ケーブルベヤ等を省いた簡易モデリングとなっているため、干渉チェックは未対応です。動作確認用としてご使用ください。また、L軸のストローク長はデフォルト値となっています。必要に応じて変更してください。
変更方法を以下に説明します。
- L軸ストローク長のデフォルト値
| 軸 | ストローク長のデフォルト値 |
|---|---|
| L 軸 | 1,000 mm |
L軸ストローク長の変更
アームモデリングのツリーから、モデル「L」を選択します。また「倍率」-「スケール」が、「全」になっているのを確認し、「X」にL軸のストローク長を入力します。
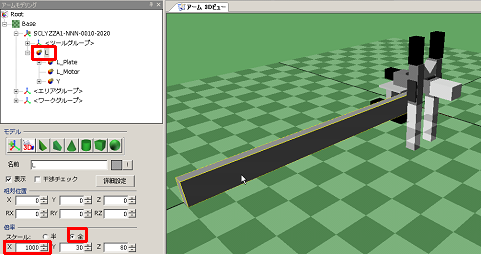
- 変更時の設定項目
| アームモデリングのツリー | 倍率 | |
|---|---|---|
| 「L」を選択 | スケール「全」を選択 | 「X」にL軸のストローク長を入力(mm) |
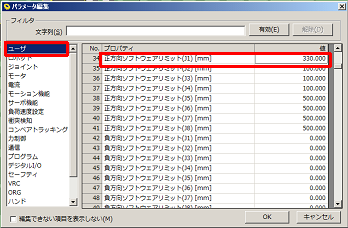
L軸ソフトウェアリミットの変更
「プロジェクト」-「パラメータ」を選択します。

「パラメータ編集」画面より 「ユーザ」-「正方向ソフトウェアリミット(J1)[mm]」を選択します。「値」に設定値を入力します。
以上でストローク長、およびソフトウェアリミットの変更は終了です。
ID : 5638