
ID : 5605
ロボットシステムの構成機器
ロボットシステムの全体構成は下記の通りです。
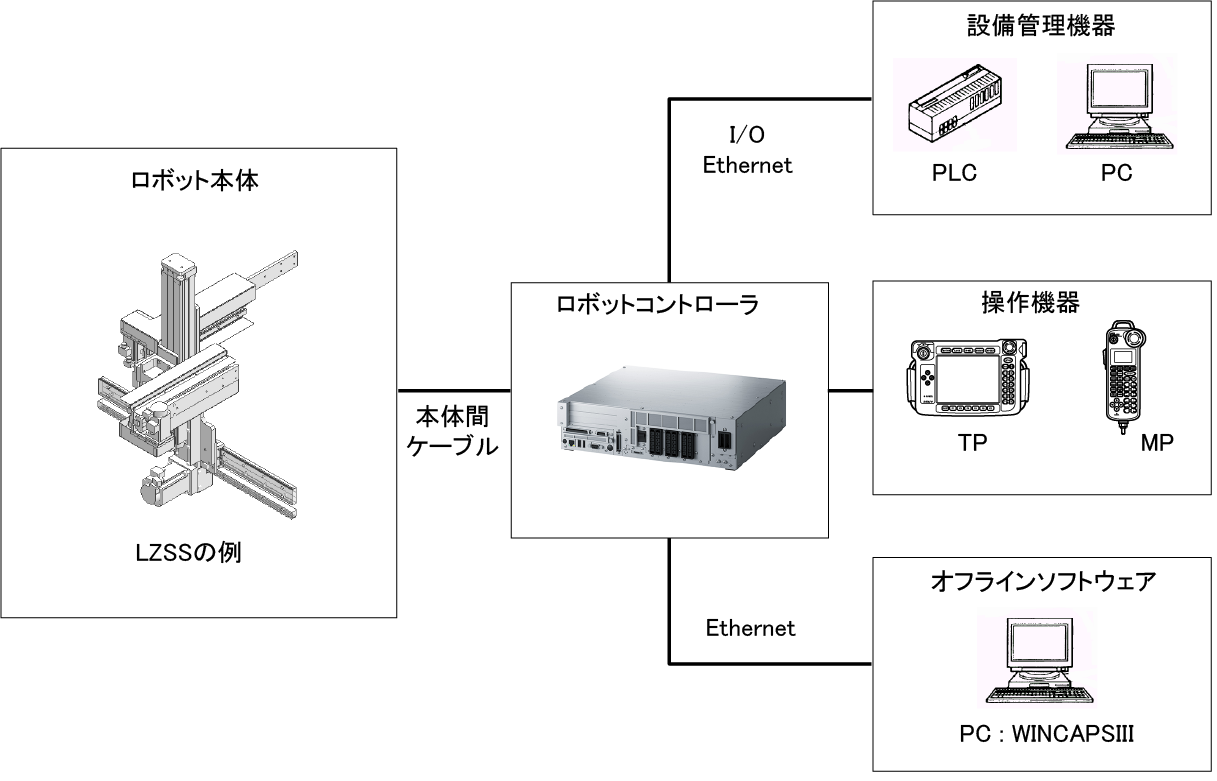
ロボット本体
工程間や設備間などにおいて、ワークの搬送および投入取出しを行うための搬送用ロボットです。
作業に応じた軸構成にて8つのロボットタイプがあります。詳細は「ロボットタイプ」を参照してください。
手先であるフランジ部には、ハンドなどのエンドエフェクタをお客様にて装着してください。
ロボットコントローラ
ロボットコントローラはロボット本体の動きを制御します。設備管理機器からの信号をもとに作成されたプログラムに従ってロボット本体を動かします。また、操作機器の接続により、ロボットの手動操作や各種設定など行うことができます。
操作機器
ロボットの手動操作や各種設定などの操作をするオプション機器です。
ハードウェアの詳細、操作の詳細は「ティーチングペンダント操作ガイド 」と「ミニペンダント操作ガイド」を参照してください。
TP:ティーチングペンダント
多機能操作機器で、ロボット操作、教示、モード変更、プログラム起動、プログラミングおよび全ての設定を行うことができます。簡易操作盤機能を使用して、操作盤として使用することもできます。
MP:ミニペンダント
簡易操作機器で、ロボット操作、教示、モード変更、プログラム起動、一部の設定を行うことができます。
オフラインソフトウェア
コントローラ内のプロジェクトデータのバックアップやプログラムの編集、管理、動作シミュレーションなどを行うことができます。デンソーロボットシステムで使うオフラインソフトウェアは「WINCAPSIII」です。ロボットシステム購入時に無料でTrial版が同梱されています。詳細は「WINCAPSIIIガイド」を参照してください。
設備管理機器
お客様にて設備を管理されるシステムです。デンソーロボットは設備管理機器とCC-Link、DeviceNetなどの各種ネットワークを接続できます。
ID : 5605