
ID : 5326
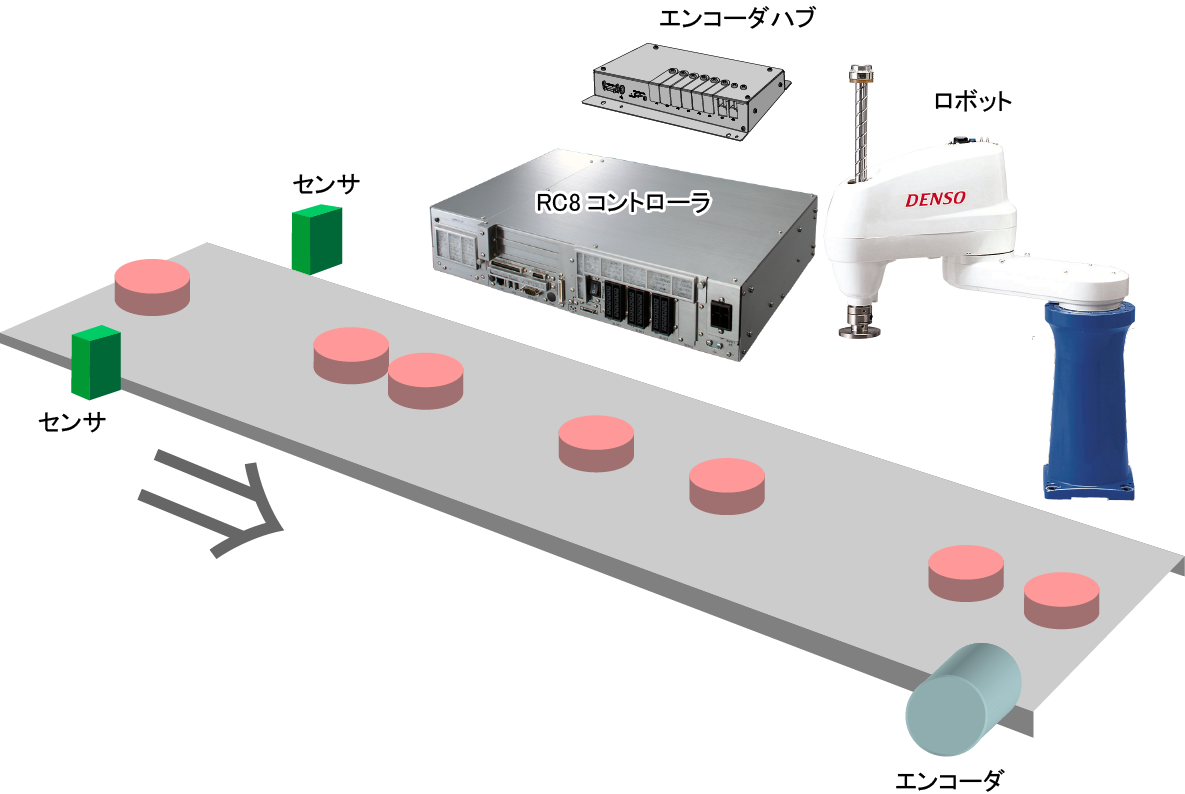
センサトラッキングの構成
構成は下図のようになります。
任意の間隔で一直線に並んで運ばれてくるワークをピックアップする場合に使用します。
ワークの位置の認識と、ピックアップの2つの動作のプログラムを並行で実行します。
ワークの認識プログラムでは、ワークがセンサを通過する時に、センサがトリガ信号を出し、そのタイミングでコントローラがエンコーダの情報を受取り、格納します。
ピックアップのプログラムでは、その格納されているワークの位置情報を基に、ロボットがワークの移動に合わせてアームを移動させながらピックアップします。
コンベアトラッキング
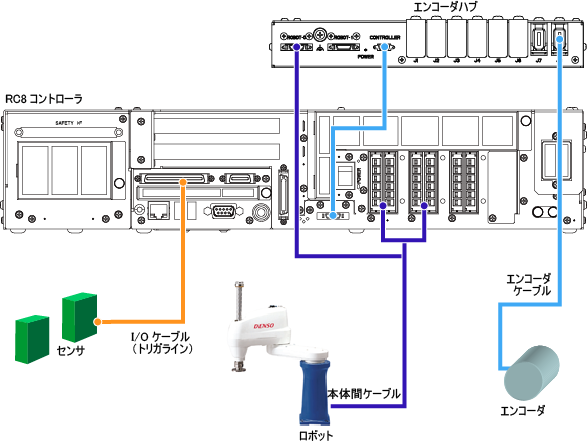
結線図
結線については以下を参照ください。
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
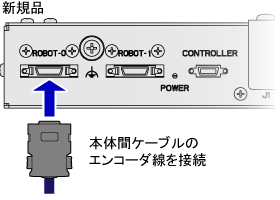
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
付加軸トラッキング
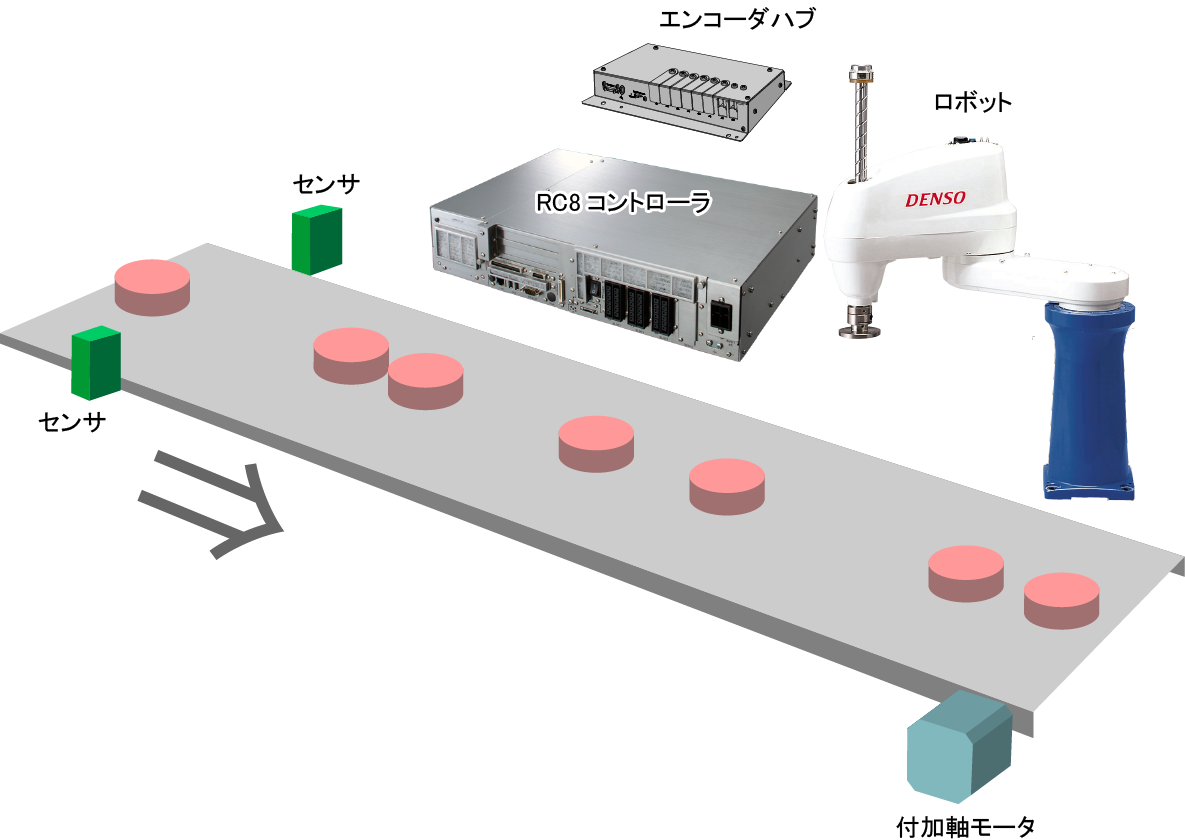
結線図
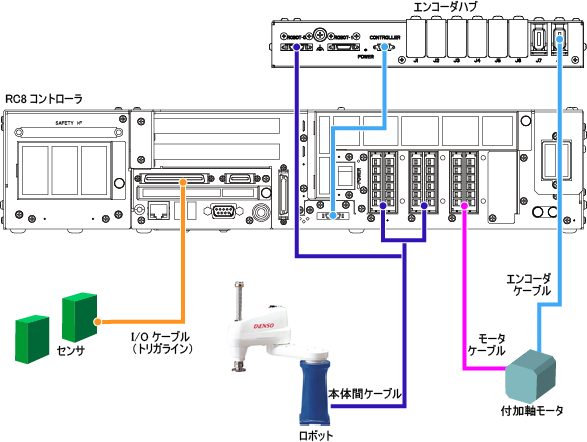
エンコーダハブについて
エンコーダハブは旧品と新規品があります。
新規品を使用する場合、本体間ケーブルのエンコーダ線は、エンコーダハブの"ROBOT-0"と印字されている方 (正面から見て左側) のコネクタに接続してください。
外形寸法および設置上の注意については、"エンコーダハブ"を参照してください。
ID : 5326