全文検索
コマンド検索
マニュアルを選択してください
VSロボット取扱説明書
VMロボット取扱説明書
VPロボット取扱説明書
プログラマーズマニュアル
RC8シリーズロボットコントローラ説明書
RC8 Mini I/O取扱説明書
専用入出力信号説明書
パラレルI/Oボード取扱説明書
DeviceNetスレーブボード取扱説明書
CC-Linkリモートデバイスボード取扱説明書
電動ハンドガイド
プロバイダガイド
機能ガイド
ティーチングペンダント操作ガイド
ミニペンダント操作ガイド
操作盤ガイド
安全上のご注意
ロボットの基礎知識
オプション品番リスト
WINCAPSIIIガイド
非推奨コマンド
HMロボット取扱説明書
HSロボット取扱説明書
RC7Mのコマンド対応表
PROFIBUSスレーブボード取扱説明書
エラーコード
XRロボット取扱説明書
EtherNet/IP Adapterボード取扱説明書
立上げハンドブック
付加軸取扱説明書
コンベアトラッキング取扱説明書
Hand I/O取扱説明書
VS-6556/6577ロボット取扱説明書
MC8(モーションコントローラ)取扱説明書
コントローラ保護ボックス取扱説明書
PROFINET IOデバイスボード取扱説明書
DeviceNetマスタボード取扱説明書
工程間搬送ロボット取扱説明書
I/O変換ボックス取扱説明書
パラメータリスト
EtherCATスレーブボード取扱説明書
外部視覚ガイド
内蔵視覚ガイド
協調機能ガイド
非常停止スイッチボックス取扱説明書
用語集
本書の見方と操作方法
Q&A
HSRロボット取扱説明書
RC8A セーフティモーション仕様 取扱説明書
RC8A Mini I/O取扱説明書
EtherCAT Slave Motion取扱説明書
HSA1ロボット取扱説明書
外部付加軸(EtherCAT)取扱説明書
円形トラッキング取扱説明書
Command-Slave FBリファレンスガイド_SIEMENS-S7
Command-Slave 活用ガイド_SIEMENS-S7
デュアルアーム制御機能取扱説明書
Command-Slave 活用ガイド_Rockwell
Command-Slave AOIリファレンスガイド_Rockwell
Command-Slave FBリファレンスガイド_CODESYS
Command-Slave 活用ガイド_CODESYS
Command-Slave FBリファレンスガイド_ProConOS
Command-Slave 活用ガイド_ProConOS
食品用ロボットジャケットセット
IDジャンプ
AND
OR
文字サイズ
小
中
大
HOME
ロボット概要、設置、保守
HMロボット取扱説明書
製品概要
ロボット本体各部の名称
各部の名称と動作方向
<< 前へ
次へ >>
安全上のご注意
ロボット概要、設置、保守
立上げハンドブック
コントローラ、I/O接続
操作ガイド
プログラミング
WINCAPSIIIガイド
オプション
エラーコード
パラメータリスト
その他
ID : 4573
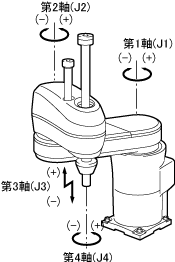
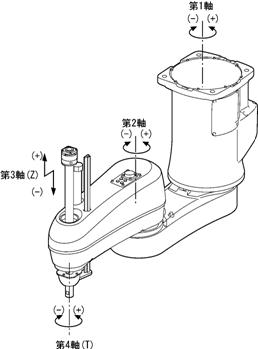
各部の名称と動作方向
ロボット本体の各部名称と動作方向を下図に示します。
UL仕様のセカンドアームには、モータONランプが装着されています。
ロボットに、動作しない、または動作距離が小さい軸がある場合は、その軸の軸受に必要な油膜が形成されにくくなり、早期に摩耗が進むことがあります。
軸受の早期摩耗を防止するため、該当の軸を、1日に数回以上、ある程度大きな角度で動作させるようにしてください。
各部の名称と動作方向(HMシリーズ)
各部の名称と動作方向(HMSシリーズ)
ID : 4573
<< 前へ
次へ >>
ページトップへ
 HOME
HOME