
ID : 4456
アーム3Dビュー
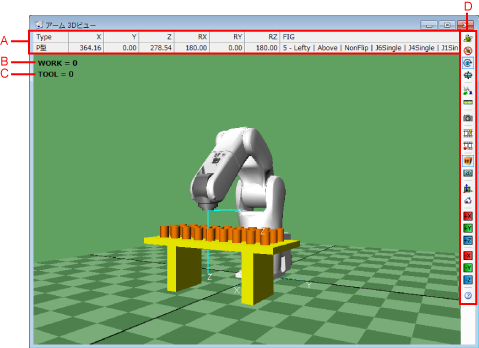
ロボットを3Dで表示します。
ロボットの現在位置や動作範囲の確認、また、障害物などのオブジェクトを配置して周辺設備への干渉をチェックすることができます。
項目の説明
A:現在位置表示
ロボットの現在位置を変数(P型、J型、T型、J-EX型)の値で表示します。
「現在位置表示」は、「アーム」メニューの「現在位置表示」で切り替えることができます。
B:ワーク番号
現在のワーク番号を表示します。
「ワーク座標」は、「アーム」メニューの「ワーク座標系モニタ」で表示/非表示を切り替えることができます。
C:ツール番号
現在のツール番号を表示します。
「ツール座標」は、「アーム」メニューの「ツール座標系モニタ」で表示/非表示を切り替えることができます。
D:アーム3Dビュー 操作用 ツールバー

D-1:回転
マウス操作で視点を画面中心で回転させます。
D-2:視点固定
現在の位置で視点を固定します。
D-3:回転:Z軸周り
マウス操作で視点をZ軸周りに回転します。(デフォルト設定)
D-4:回転:画面直交
視点を水平/垂直方向に回転させます。
D-5:3Dビュー教示
オブジェクトをクリックすることで教示します。
D-6:2点間距離計測
クリックした2点間の距離を計測します。
計測結果は出力ウィンドウに表示されます。
D-7:スクリーンショット
スクリーンショットをファイルに保存します。
D-8:録画設定
録画時の動画圧縮設定をおこないます。
D-9:録画 開始/停止
録画を開始および停止します。
D-10:3D表示
画面を3D(透視投影)モードに切替えます。
D-11:2D表示
画面を2D(平行投影)モードに切替えます。
D-12:原点中心
ベース原点を画面中心にして表示します。
D-13:全体表示
オブジェクト全体を表示するサイズに切替えます。
D-14:視点切替え(+X)
+X方向からの視点で画面を表示します。
D-15:視点切替え(+Y)
+Y方向からの視点で画面を表示します。
D-16:視点切替え(+Z)
+Z方向からの視点で画面を表示します。
D-17:視点切替え(-X)
-X方向からの視点で画面を表示します。
D-18:視点切替え(-Y)
-Y方向からの視点で画面を表示します。
D-19:視点切替え(-Z)
-Z方向からの視点で画面を表示します。
D-20:操作ヘルプ
画面右上に操作方法を表示します。
マウスを使った視点操作
- 回転:左ドラッグ
- パン:左右両押しドラッグ
- ズーム:右ドラッグ
マウスを使ったロボット・オブジェクト操作
選択:左クリック
- オブジェクトを画面中心に視点移動:Shift+左クリック
- オブジェクトを画面全面に表示:Alt+左クリック
移動:Ctrl+左クリック
- 直線移動:座標軸左ドラッグ
- 回転:Ctrl+座標軸左ドラッグ
ID : 4456