
ID : 3308
プログラミング例
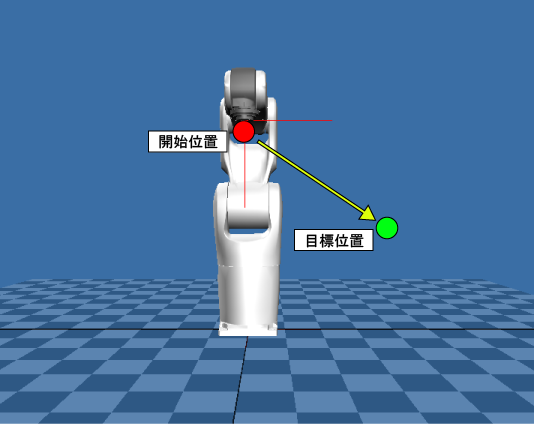
Command-Slave機能で、ロボットを制御するプログラミングの一例を示します。
例として、6軸ロボットを開始位置から目標位置までPTP制御で絶対位置移動させるプログラムを作成します。
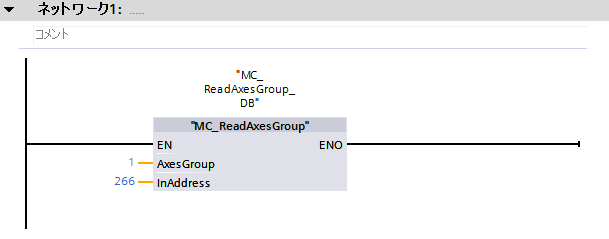
1
プログラムの先頭に"MC_ReadAxesGroup"を配置します。
 |
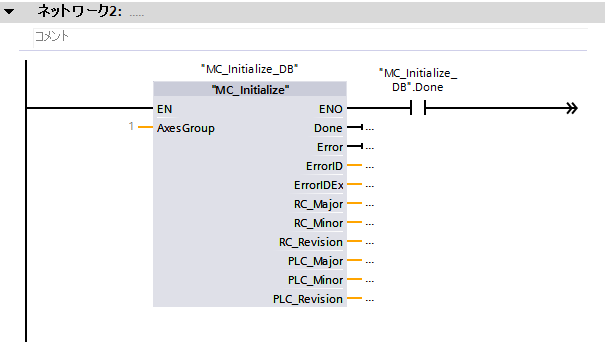
2
"MC_Initialize"を配置します。
下図のように、後に"ノーマルオープン"を配置することで、ロボットコントローラとPLCの通信が正常に行われていない場合、以降の処理を停止することができます。
 |
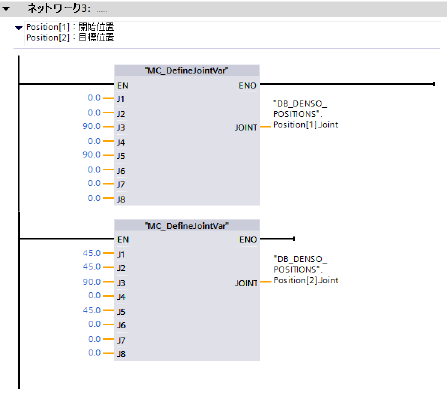
3
"MC_DefineJointVar"を配置し、開始位置と目標位置を指定します。
すでに開始位置と目標位置を指定している場合は、STEP4へ移行してください。
 |
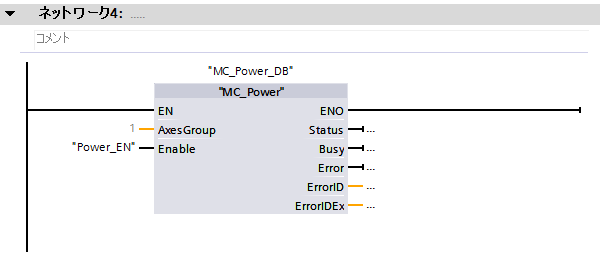
4
ロボットのモータをONするために、"MC_Power"を配置します。
入力パラメータ"Enable"には、任意のグローバル変数を割り当ててください。
 |
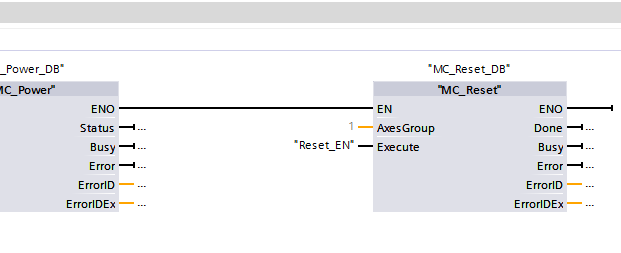
5
エラーが発生した場合に備えて、"MC_Power"の後に"MC_Reset"を配置します。
入力パラメータ"Execute"には、任意のグローバル変数を割り当ててください。
 |
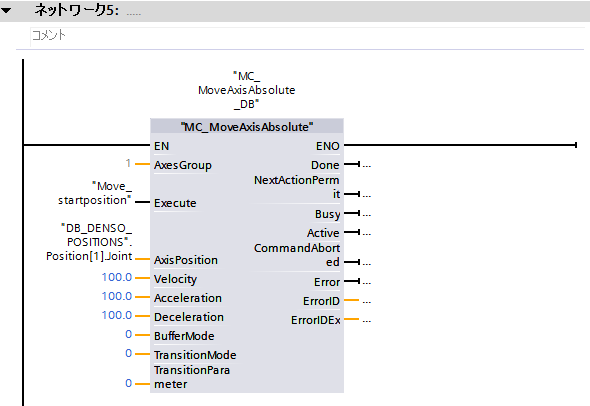
6
ロボットを開始位置に移動させるために、"MC_MoveAxisAbsolute"を配置します。
入力パラメータ"Execute"には、任意のグローバル変数を割り当ててください。
入力パラメータ"AxisPosition"には、指定した開始位置を割り当ててください。
 |
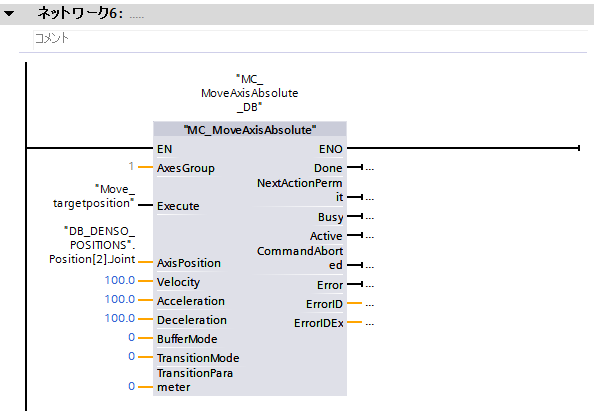
7
ロボットを目標位置に移動させるために、"MC_MoveAxisAbsolute"を配置します。
入力パラメータ"Execute"には、任意のグローバル変数を割り当ててください。
入力パラメータ"AxisPosition"には、指定した目標位置を割り当ててください。
 |
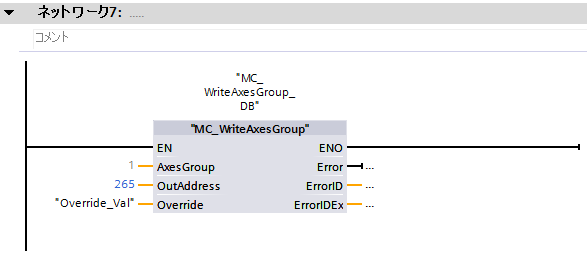
8
プログラムの最後に"MC_WriteAxesGroup"を配置します。
入力パラメータ"Override"には、任意のグローバル変数を割り当ててください。
 |
以上で、プログラムの作成は終了です。
ID : 3308