
ID : 2958
概要
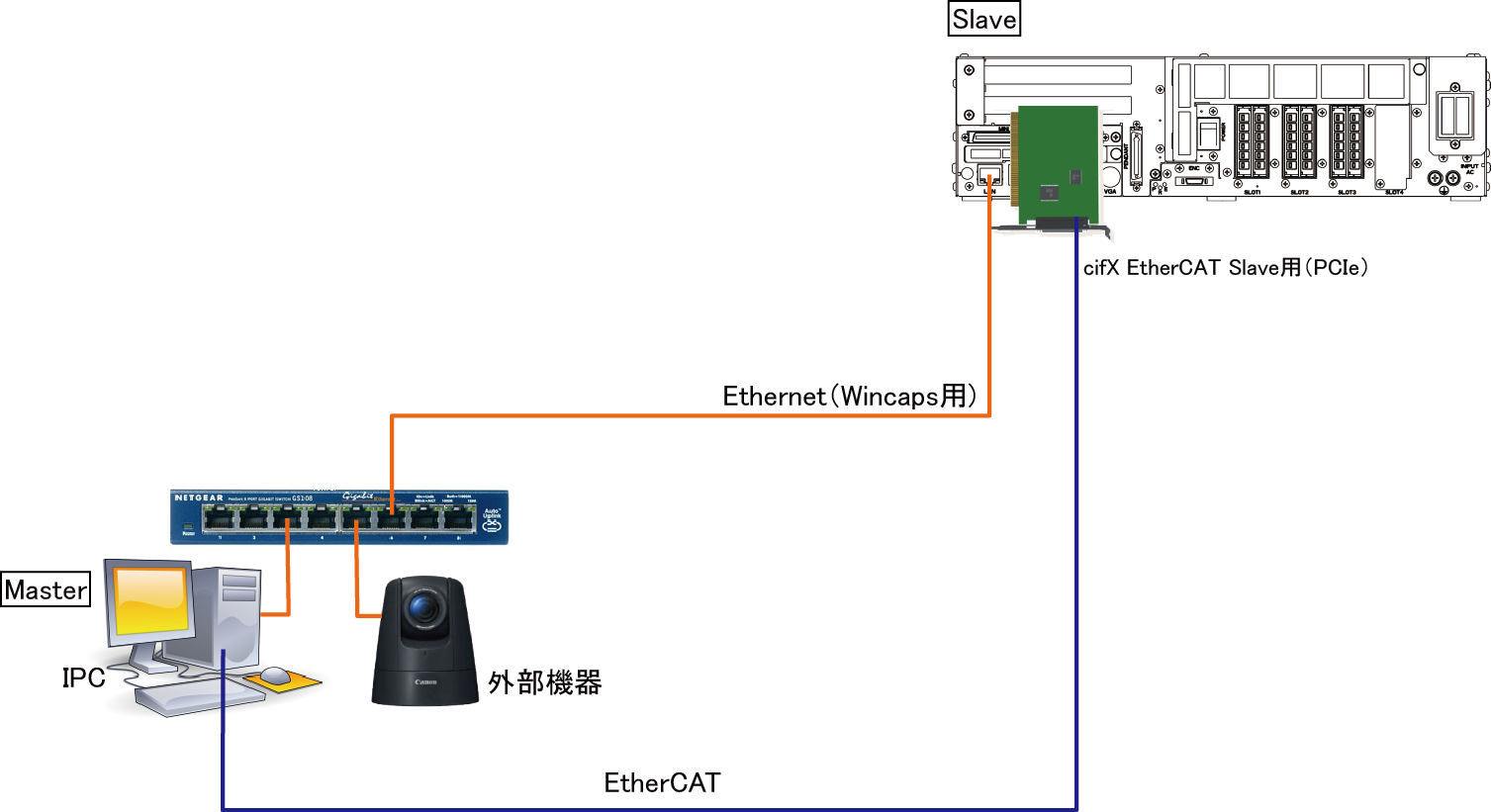
ロボットの軌道生成はEtherCAT Masterを搭載したIPCでユーザが行い、EtherCAT通信を使って、SlaveとなるRC8シリーズコントローラに送信すると、RC8シリーズコントローラがその位置指令値どおりにロボットを動作させる機能です。
この機能はVer.2.2.*以降で有効です。
EtherCAT 通信を行うためにRC8シリーズコントローラのPCIeスロットにEtherCATスレーブボード(Motion)を増設する必要があります。また機能を有効にするためには「EtherCAT Slave Motion」ライセンス(有償)も必要です。
EtherCATスレーブボード(Motion)は、EtherCATスレーブボードと同じです。
EtherCATスレーブボード(Motion)の詳細については、「EtherCATスレーブボード取扱説明書」および「コントローラ関連オプション 」を参照してください。
「EtherCAT Slave Motion」ライセンスの詳細については、「オプション機能とライセンス 」を参照してください。
構成
ID : 2958