
ID : 2887
コンベアキャリブレーション実施手順
コンベアキャリブレーションは以下の順で実施します。
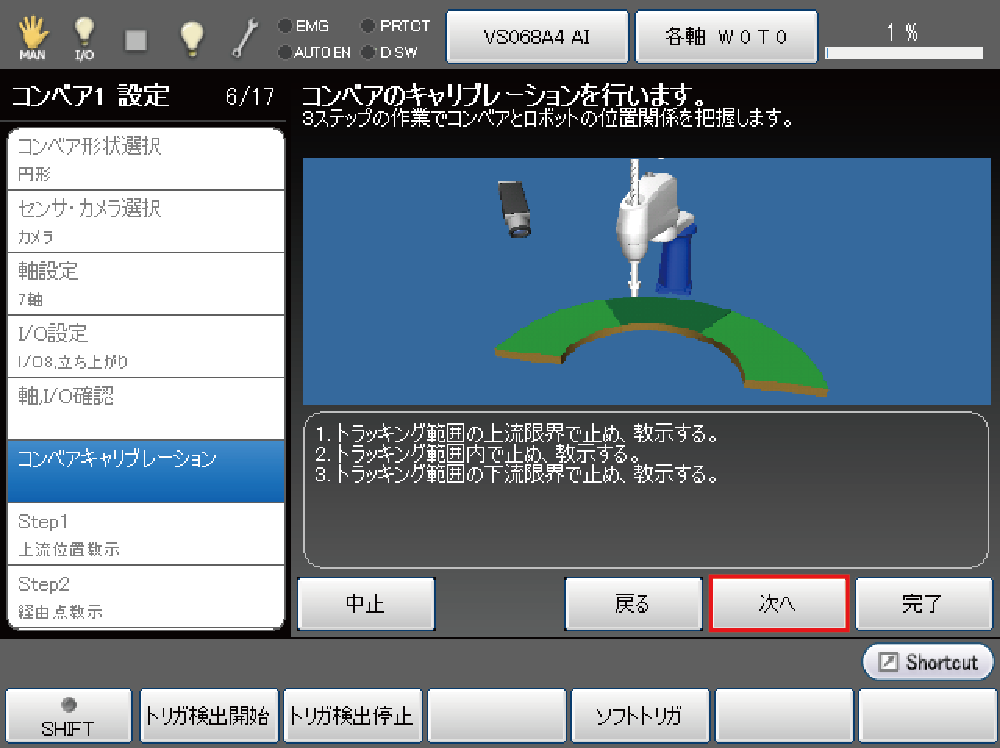
1 キャリブレーション手順の確認
キャリブレーションの手順を確認後、[次へ]を押します。
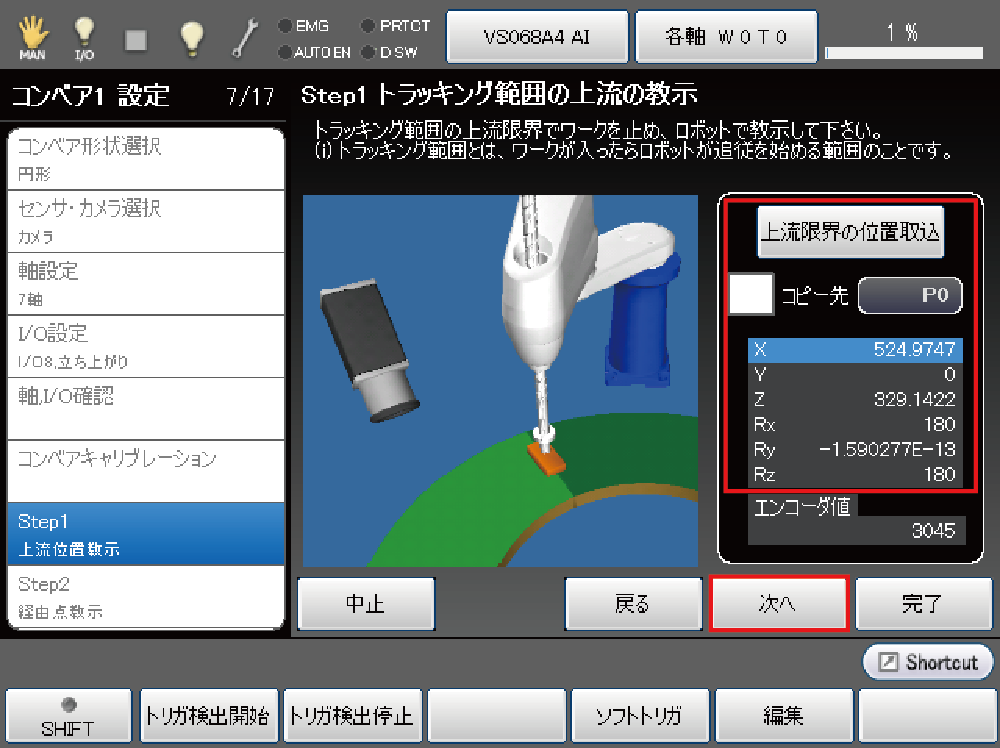
2 トラッキング範囲上流限界の教示
トラッキング範囲の上流側の限界位置でワークを止め、ロボットをワーク上へ移動し、[上流限界の位置取込]を押します。
ロボット位置が取り込まれます。
取り込まれた値を確認し、よければ[次へ]を押します。
- ロボット位置の取り込みを再度行なう場合は、位置を取り込むかのシステムッセージが表示されます。
- 上流限界の位置取り込みを行った時の姿勢から、ワーク把持基本姿勢が算出されます。
編集ボタンを押すと位置の座標を変更することができます。
ターンテーブル上流と下流の位置取込の座標とその時取得されたエンコーダ値を用いて、ターンテーブルの送り量と方向を計算しています。したがって、ターンテーブルの送り量と方向に影響が出ることを考慮したうえで座標の値を編集してください。
3 トラッキング範囲経由点の教示
トラッキング範囲の途中でワークを止め、ロボットをワーク上へ移動し、[経由点位置取込]を押します。
ロボット位置が取り込まれます。
取り込まれた値を確認し、よければ[次へ]を押します。

4 トラッキング範囲下流限界の教示
トラッキング範囲の下流側の限界位置でワークを止め、ロボットをワーク上へ移動し、[下流限界の位置取込]を押します。
ロボット位置が取り込まれます。
取り込まれた値を確認し、よければ[次へ]を押します。
上流限界の位置と下流限界の位置の中点位置が、コンベア基準位置になります。

5 キャリブレーション結果の確認
算出したパラメータ値が表示されますので、内容を確認し、[次へ]を押します。
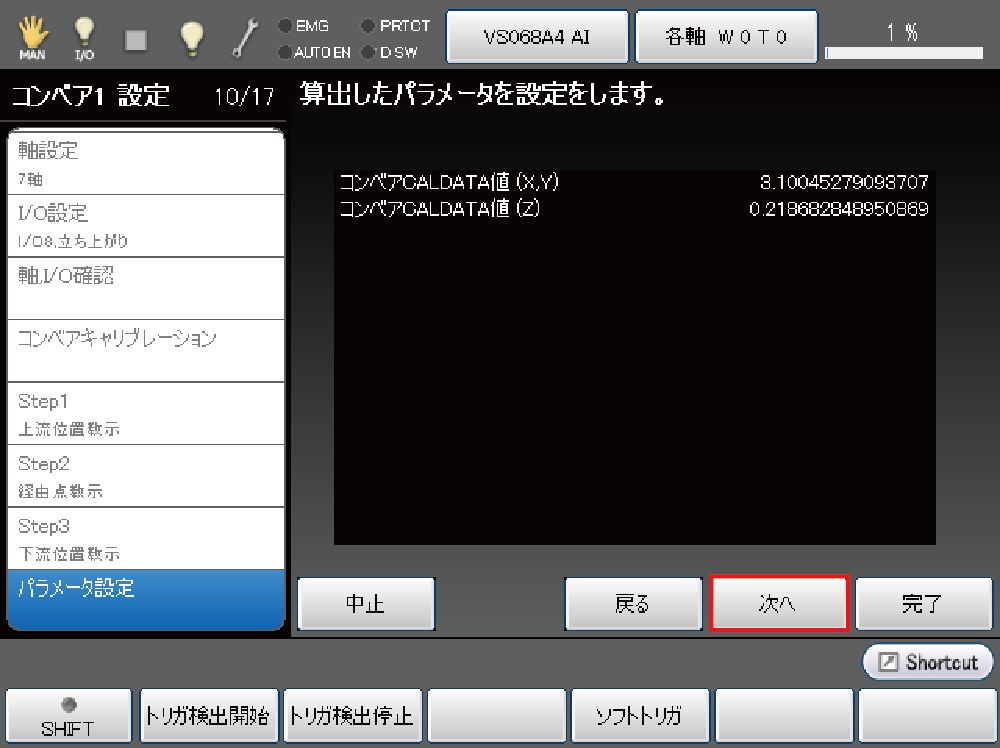
「カメラキャリブレーション」へ続きます。
ID : 2887