
ID : 2435
位置決め速度設定時の注意
- ロボットを高速で水平移動させたい場合は、できるだけZ軸を上昇端付近となるようにティーチングを行なってください。
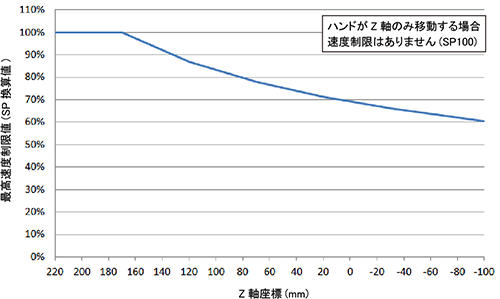
- Z軸下降端付近での位置決めをより安定させるためにロボットがPTP動作で移動する場合に限り、J1軸とJ2軸のみ下図に示すように自動的にZ軸座標位置により最高速度制限をしています。従って、J1軸、J2軸の位置決め時間は下図の最高速度制限値によって長くなります。

たとえば、動作開始位置のZ軸座標:220mm、動作終了位置のZ軸座標:-100mmの場合。
SP100で運転するときの最高速度制限値はZ軸座標:220mmのとき100%、Z軸座標:-100mmのとき60%となり、
最高速度は、値の小さい方(最下降端時)の60%となります。
J1軸、J2軸の最高速度制限 (PTP動作)
 |
ID : 2435