
ID : 1968
腕の形態について
4軸ロボットはツール先端の1つの位置と姿勢に対して、下図に示すように2通りの手系をとることができます。これに第4軸の形態を組み合わせると、1つの位置と姿勢に対して下表に示す4種類の形態をとることができます。
| 値 | 形 態 |
|---|---|
| 0 | SINGLE―RIGHTY |
| 1 | SINGLE―LEFTY |
| 16 | DOUBLE―RIGHTY |
| 17 | DOUBLE―LEFTY |
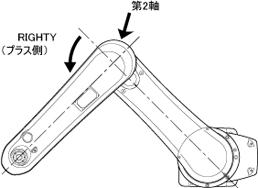
レフティー(LEFTY)·ライティー(RIGHTY)
| 右手系 | 左手系 |
|---|---|
 |
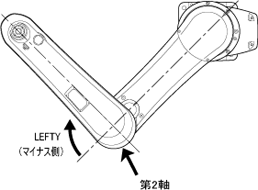 |
図に示すようにロボットを上から見て(床置きの場合)第2軸がベース座標系X軸のプラス側にある状態を右手系と呼び、第2軸がそのマイナス側にある状態を左手系と呼びます。
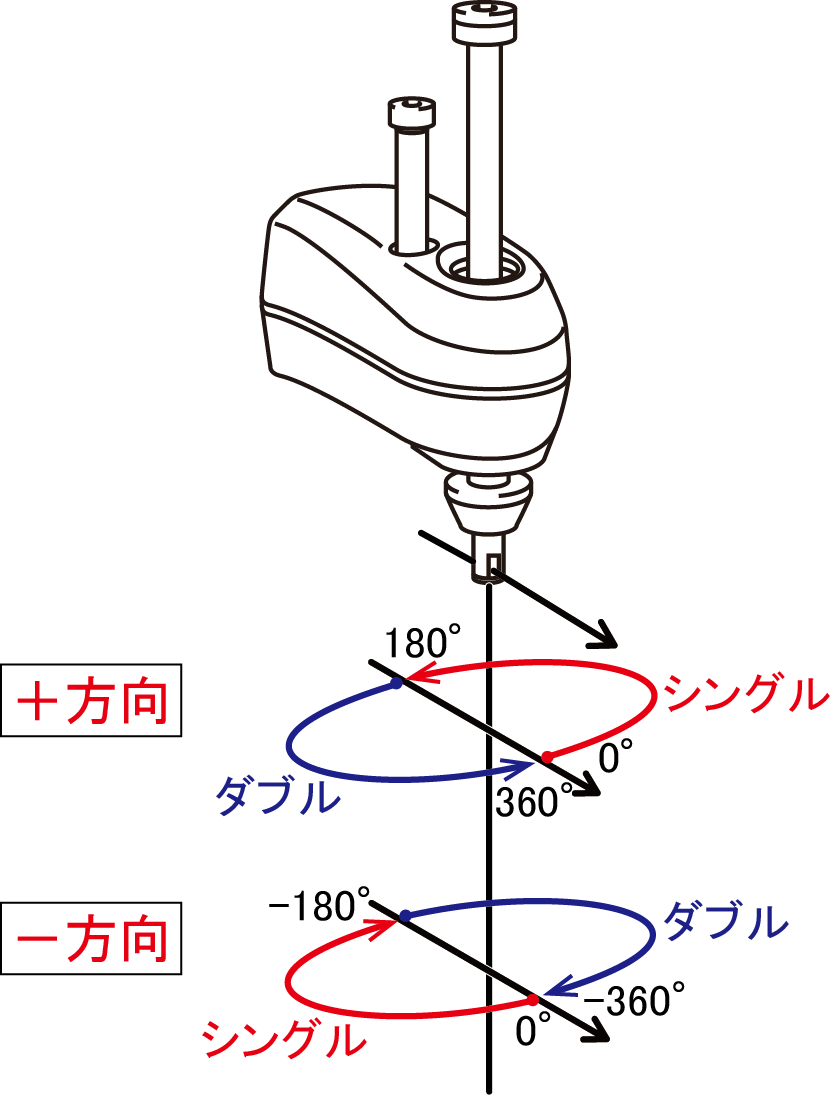
シングル(SINGLE)·ダブル(DOUBLE)
第4軸の回転角θ4が(-180°<θ4≤180°)の場合がシングルで、(180°<θ4≤360°または -360°<θ4≤-180°)の場合がダブルです。
ID : 1968