
ID : 1938
べ一ス座標系とワーク座標系
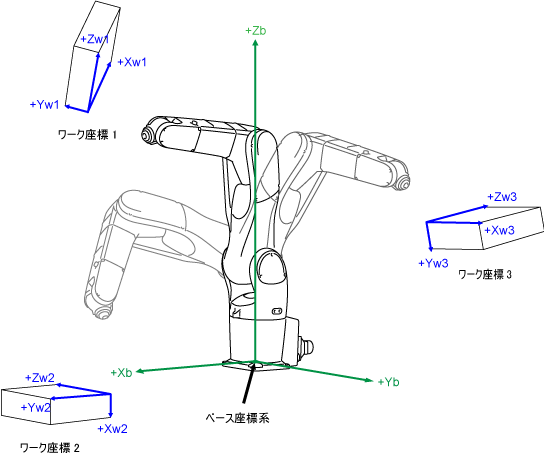
6軸ロボットのベース座標系
ベース座標系とは、ロボットのベース中心を原点とする三次元直交座標です。ベース座標系のX軸をXb、Y軸をYb、Z軸をZbと表現します。
6軸ロボットのワーク座標系
ワーク座標系は、ロボットが操作しようとする対象のワークの作業空間毎に定義される三次元直交座標です。原点は、任意の場所に定義できます。下図に示すように、その原点は対象ワークの包絡直方体の一つの頂点となります。ワーク座標はベース座標に対する座標原点位置(X,Y,Z)とベース座標のX軸・Y軸・Z軸周りの回転角(RX,RY,RZ)で表現します。
最大7種類の登録ができ、1~7のワーク座標番号を付けます。
ワーク座標未定義の場合は、ベース座標となります。
ID : 1938