
ID : 1089
Z軸バランス調整(4軸ロボット専用補助機能)
操作キー
[補助機能] (手動モードのみ)
操作方法
HM標準ロボットは、エア圧力の調節を行います。
HM標準以外のH*シリーズロボットとXRロボットは、重力補償補正を行います。(Ver.2.2.*以降)
Z軸バランス調整を行なうには、モータ電源が“入り”でなければなりません。
HM標準ロボット
1
[補助機能]を押して、「補助機能選択一覧」を表示します。
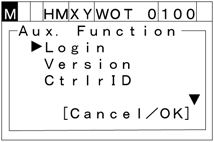
2
上下カーソルキーでスクロールして"ArmAux"を選択します。
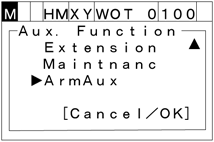
3
"ArmAux"選択後、[OK]を押します。「アーム補助画面一覧」が表示されます。
[Cancel]を押すと、Z軸バランス調整は中止します。
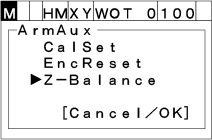
4
"Z-Balance"を選択して[OK]を押します。「Z軸エアバランス調整画面」が表示されます。
ゲージのサムがOKの範囲になるように、エア圧を調節してください。
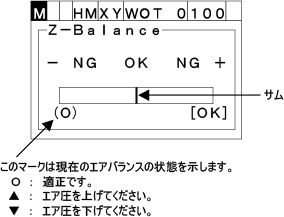
モータONの状態で[OK]を押してください。モータOFFだと「Turn ON motor.」のメッセージが出ます。
5
Z軸エアバランスを調整して[OK]を押すと、調整完了が表示されます。
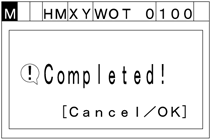
6
[OK]または[Cancel]を押すと、Z軸バランス調整を終了します。
H*シリーズロボット(HM標準以外)およびXRロボット(Ver.2.2.*以降)
HM標準ロボットのStep3まで同じ手順です。
4
"Z-Balance"を選択して[OK]を押します。「Execute GrvOffset?」が表示されます。
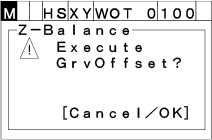
5
以下の注意事項を確認し、[OK]を押します。
- モータONしてください。
- ロボット停止状態にしてください。
- 外力(重力を除く)を受けない状態にしてください。
モータONの状態で[OK]を押してください。モータOFFだと「Turn ON motor.」のメッセージが出ます。
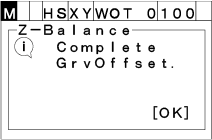
6
重力補償補正が完了すると、メッセージが表示されます。[OK]ボタンを押すとZ軸バランス調整が終了します。
ID : 1089