ArchMove
(ライブラリ)
【Ver.1.9 以降の4軸ロボットのみ】

アーチモーションを実施します。

ArchMove (<目標位置(P型変数)>、<Z軸動作量>)

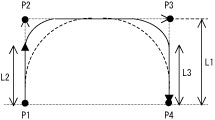
現在位置P1と目標位置P4および経由点P2、P3の4点にてP&P動作を行ないます。
経由点P3は目標位置に対して指定した<Z軸動作量>(L1)上昇させた位置となります。 経由点P2は現在位置のZ軸延長上で経由点P3のZ軸値と同一となる位置となります。
図中のアーチ開始位置(L2)、アーチ完了位置(L3)はSetArchParamにて設定します。

<pacman.h>ファイルが必要です。


-
ロボット制御権を取得(TAKEARM)したタスクにて実行してください。
-
この動作は位置制御を行っている訳ではありません。動作速度によって動作経路が変化しますので、動作の際は周辺設備との干渉に気を付けてください。
-
現在位置と目標位置のZ値が同一でない場合は正常に機能しません。Z方向の位置を同一にした状態で使用してください。
-
ワーク座標系には対応していません。ベース座標系で使用してください。

|
CALL ArchMove (P10,100)
|
'目標位置P10、Z軸動作量100mmで動作します。
'なお、アーチ開始位置、アーチ完了位置は
'現在の設定値が適用されます。
|