VISDEFTABLE
(ステートメント)

カメラ映像の取り込み、画像出力の際のルックアップテーブルデータを設定します。

VISDEFTABLE <テーブル番号>,<入力値>,<出力値>

<テーブル番号>
ルックアップテーブル番号を指定します。(5~15)
<入力値>
テーブルの入力値を指定します。(0~255)
<出力値>
テーブルの出力値を指定します。(0~255)
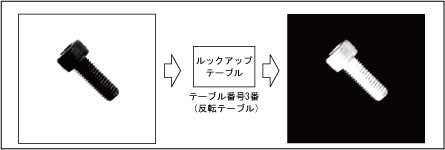
ルックアップテーブルを用いて変換した例

-
本命令を設定しない場合、初期設定値に基づきます。
-
本命令は2~3(秒)の実行時間を要します。
-
テーブル番号0~4はあらかじめ有用と考えられるテーブルが設定されています。本命令では変更はできません。テーブル0番:ノーマル(0~255)テーブル1番:70% 輝度圧縮 (0~175)テーブル2番:γ補正テーブル3番:反転テーブル4番:70% 輝度圧縮反転
-
本命令はロボットコントローラではμVisionボード(オプション)が必要です。
-
本命令実行時に電源をOFFしないでください。次の電源ON時に正常終了しなかったと判断し、視覚に関する情報を初期化します。


|
VISSCREEN 1,0,1
|
'
|
|
VISCLS 0
|
'
|
|
VISCAMOUT 1,1
|
'カメラ1番からの映像(動画像)をモニタにテーブル1
'番(0~175約75%輝度圧縮)で変換し表示します。
|
|
DELAY 5000
|
'5秒停止
|
|
VISDEFCHAR 4,4,2
|
'
|
|
FOR I1 = 0 TO 255
|
'
|
|
VISLOC 10,10
|
'
|
|
VISPRINT I1
|
'
|
|
VISDEFTABLE 5,I1,255-I1
|
'テーブル5番の設定
|
|
NEXT I1
|
'
|
|
VISCAMOUT 1,5
|
'カメラ1番からの映像(動画像)を反転しモニタに表
'示します。
|